June 8, 2023
The common representation of a four-dimensional object is the tesseract. Continuing with the symmetrical representation of dimension from the point to the line to the square to the cube, I propose that a tesseract is a symmetrical representation of a cube’s fourth spatial dimension’s path of motion as each part of it is changed in an equal manner by change in size (growth of expansion/contraction). The paths that those parts travel are represented by the edges and faces between the parts’ original and moved states. The path of each corner is represented by a new edge, making eight new edges in addition to the twelve edges of the original and moved cubes, making a total of 32 edges. The path of each edge is represented by a new face, making twelve new faces in addition to the six faces of the original and moved cubes, making a total of 24 faces. Finally, the path of each face is represented by a new solid, making six new solids in addition to the two solids of the original and moved cubes, making a total of eight solids.
For this type of symmetrical motion, the new measurable qualities can be calculated based on the dimensions of the original object. For a tesseract’s representation of a cube’s motion of equal change in size, its corners are doubled. The tesseract’s edge amount is the original cube’s edge amount doubled plus its corner amount. The tesseract’s faces are the cube’s face amount doubled plus its edge amount. Finally, the tesseract’s solids are the cube’s solid amount doubled plus its face amount. The motion of each dimensional quality is represented by a shape of a dimension one order higher than it.
The tesseract is a representation of a cube’s symmetrical fourth-dimensional spatial motion of growth. How, then, can we represent the motions of other types and the motions of other shapes? Imagine a simple two-dimensional object, the triangle. From each corner of a horizontally flat triangle rise three vertical lines that meet at a point above the triangle, forming a three-dimensional tetrahedron. If the top point only is moved, it will affect the spatial position of the three vertical edges and faces. To represent this movement in a form like that of the tesseract, the states of the original and moved tetrahedron will be shown with a line drawn between the original and moved positions of the top point and new triangles will be formed that show the paths of the affected edges. If the motion is a symmetrical growth like that of the cubes of the tesseract, a tetrahedron within a tetrahedron will be shown with points of the original and moved shapes connected by new edges and the edges of the original and moved shapes connected by new faces.
Motions of uniform growth (expansion/contraction) or partial growth (distortion) pertain to the change of the parts of an object, while positional relation and rotational motion pertain to an object as a whole.
Consider, like the tesseract, the three-dimensional representation of a cube’s four-dimensional path of motion in other ways. As it moves a distance in a direction, edges extend between the points, and faces. between the edges.
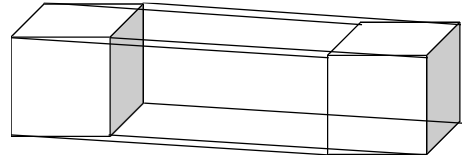
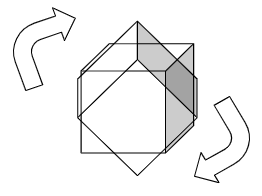
For rotational motion of a cube, curves must be drawn from the points of the original position to the points of the rotated position.
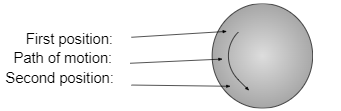
For an object with no edges such as a sphere. How should its paths of motion be represented? A point on the sphere will have to be referenced and its path of motion represented by the shape formed between the original and moved states of the sphere.
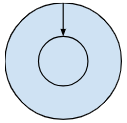 How, also, would, like the tesseract, a sphere’s motion of symmetrical growth be represented. There are no corners to draw new edges from, but there is a new solid between the two, which is the difference in size between the original and the moved spheres. The representation is simply the two states of the object, but, like adding the point to the previous sphere, lines can be added to show by what path the motion followed.
How, also, would, like the tesseract, a sphere’s motion of symmetrical growth be represented. There are no corners to draw new edges from, but there is a new solid between the two, which is the difference in size between the original and the moved spheres. The representation is simply the two states of the object, but, like adding the point to the previous sphere, lines can be added to show by what path the motion followed.
What about multiple motions at the same time, like a planet rotating as it revolves around the sun, and the sun around the centre of the Milky Way? The complexities of some motions are difficult to represent two-dimensionally on a piece of paper, but are easier to understand with animation technology that has so far successfully represented three-dimensional objects and motions two-dimensionally on video screens. The development of three-dimensional projections will help represent more complex paths of motions from celestial objects to atoms to advanced machinery and technology.
I think considering the study of the geometry of motion is where the focus of higher dimensional mathematics will make most sense.
Leave a Reply